
Page 345 - Manual Oficina Polaris RZR XP 1000 17-18
P. 345
FINAL DRIVE
8. Thoroughly clean the joint with an appropriate solvent 14.Slide the joint and shaft into the housing.
and dry the joint to prevent any residual solvent from
being left in the joint upon reassembly.
CAUTION
DO NOT hammer on the joint to install it in the housing.
9. Visually inspect the joint for damage. Replace if
needed.
10.Clean the splines on the end of the shaft and apply a 15.Install the large circlip into the groove of the plunging
light coat of grease prior to reassembly. joint housing.
11. Slide the small boot clamp and boot (small end first) 16.Remove excess grease from the CV joint's external
onto the drive shaft and position the boot in its groove surfaces and place the excess grease in the boot.
machined in the shaft. 17.Pull the boot over the joint and position the boot lips
12.Install the cage / ball assembly on the shaft and install into the grooves on the joint housing and shaft. Make
a new snap ring on the end of the shaft. sure the boot is not dimpled or collapsed. 7
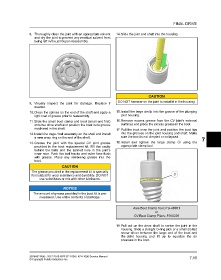
13.Grease the joint with the special CV joint grease 18.Install and tighten the large clamp e using the
provided in the boot replacement kit. Fill the cavity appropriate clamp tool.
behind the balls and the splined hole in the joint’s
inner race. Pack the ball tracks and outer face flush
with grease. Place any remaining grease into the
boot.
CAUTION
The grease provided in the replacement kit is specially
formulated for wear resistance and durability. DO NOT
use substitutes or mix with other lubricants.
NOTICE
The amount of grease provided in the boot kit is pre-
measured. Use entire contents of package.
Axle Boot Clamp Tool: PU-48951
or
CV Boot Clamp Pliers: 8700226
19.Pull out on the drive shaft to center the joint in the
housing. Slide a straight O-ring pick or a small slotted
screw driver between the large end of the boot and
the joint housing and lift up to equalize the air
pressure in the boot.
9928492 R06 - 2017-2018 RZR XP 1000 / XP4 1000 Service Manual 7.19
© Copyright Polaris Industries Inc.